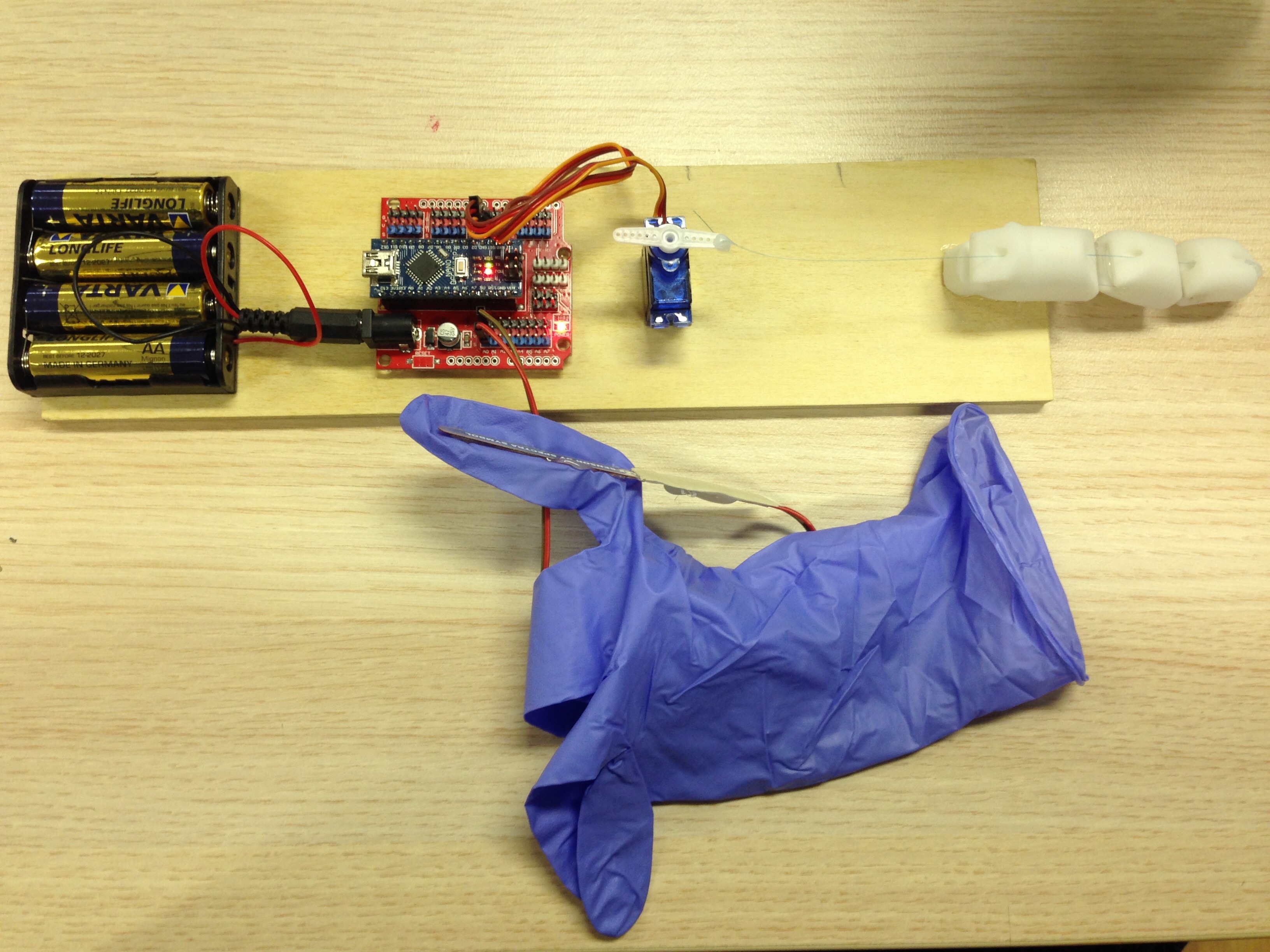
- Nano board
- 3D printed finger
- Flexi sensor
- Micro Servo (the motor)
- Batteries
- Glove
- Fishing wire
- Plastic strips
- Wooden board
- Hot glue gun
- Laptop to code
The nano board (by arduino) is where you download your progam and it sends out the information to everything else connected with wires. You can use any circuit board as long as it is compatible with your computer and coding software (java). Click here for this product.
Download a model of a finger and use a 3D printer, it would be easier if you put a hole through each joint for the fishing wire and a cut-in for the plastic strip (see image). Or if that's not possible you can use straws or paddle pop sticks, and cut them into the 3 joints to make a finger instead.

The flexi sensor measures how much bend in your real finger, then sends the information to the nano board to then move the artificial finger. Click here for the product.
This turns the finger in a rotating motion, with the help of a string to pull it to bend. Click here for the product.
Use 4 AA batteries to power the whole project, by using a battery pack with a power cord.
Any glove is fine, it can just be a rubber glove or a gardening glove.
At least 20cm of fishing wire is required, or you can use a piece of string that is able to thread through a small hole.
Any plastic strips or something that you can glue the finger joints together, and is somewhat flexible.
Get a 30cm x 10cm plywood board to glue on all of the parts on so it stays together.
A hot glue gun would be much easier to glue parts on the board and the finger together, but you can use superglue or something else that will glue things together.
A laptop with Arduino or another program that uses java is ok for coding the finger to move. You can download Arduino off the internet. Click here to download